
Introducing ‘Satlapse’ – A Bird’s-eye aerial timelapse cinematography technique.
I’ve been experimenting and developing this technique for over 8 months, shooting my first test in November 2014 using a DJI Phantom 2, GoPro Hero 4, and an H3-3D Gimbal.
Why is it called Satlapse? Using wide angle cameras, facing down, at 350-400ft in the air creates shots that look like satellite images. A coincidental nicety; in order for a small remotely piloted aircraft system (RPAS) to maintain a stable hover, it uses direct communication with satellites in Earth’s orbit (GPS).
So what’s different about this technique? Firstly, the shots are completely static with any sign of stabilisation eliminated as much as possible. No mean feat considering the fact it’s all shot using a small RPAS hovering in one spot for several minutes! Secondly, this is true timelapse, in that you are taking frame-by-frame images as opposed to speeding up video footage. This allows the shutter to be dragged using ND filters as is practiced in regular timelapse work.
The technique requires some specific things:
- a reliable, stable multi-rotor aircraft
- exacting weather conditions
- a timelapse camera, capable of very short intervals
- a location with action conducive to shorter time span captures
- UAS piloting experience
- extensive post production
- bucket loads of patience
More details about this project are provided below. For commissions and enquiries please contact me.
Here are my results so far, enjoy!
About the project
This is a non-commercial / non-funded experimental project and uses practices and experience gained from my commercial and ongoing air currency using RPAS. Naturally I take lots of precautions before deciding if a flight will be safe to perform. This includes; regular aircraft maintenance and testing, pre-deployment checks, pre-flight checks, operating checks, ensuring optimum conditions.
This particular type of aerial work requires single point hover flights (SPHF) with the RPA maintaining a stable hover by using GPS satellites. Usually RPAS flights entail travelling distances at varying altitudes within limits. SPHF generally require a single ascent to a given altitude and no other control input during the duration of the flight until a 40% battery level is reached where the control is given to manually return (fig.1).
-
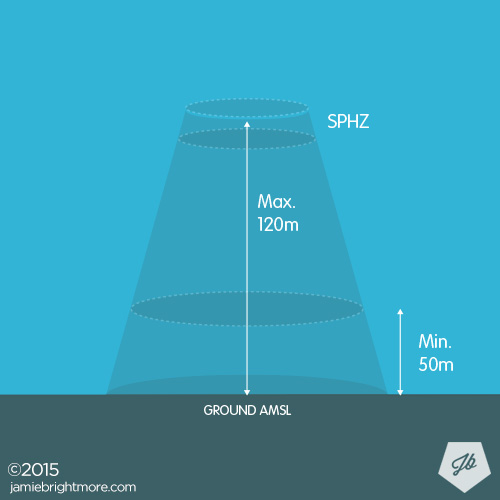
Fig.1 -

Fig.2
While the consumer grade small RPAS I use have advanced battery and GPS technology on board, an outright battery or GPS failure are the biggest technical risks present. For mitigating power failure, it’s critical to only hover where RPAS power loss could cause the least amount of problems – similar to how an RPAS pilot will always predetermine a ‘bail zone’ for any operation, except in this case the flight is maintained above this zone aside from the small amount of travel required to reach the hover zone.
In the case of a GPS failure, a problem would be immediately apparent and observed from live telemetry info, in which case ATTI mode would be manually engaged in order to safely bring the RPAS back home without the reliance of GPS.
Fundamental risk mitigation practices
Operating at less busy times, i.e, early mornings, not a weekends, peak times.
Not hovering directly over people, vehicles and structures. While some shots may appear overhead of subjects, in actual fact the craft was kept hovering above defined safe areas with the original 4K resolution images being cropped in such a way to mimic the overhead appearance (fig.3).
-

Fig.3 -

Fig.4
Briefing an assistant to maintain absolute constant eye contact with the craft during its hover flight to ensure aircraft performance and stability and to avoid a potential rare collision with birds, etc. (fig.2)
Maintaining a sufficient altitude (within the UK legal 120m limit) in order to protect people’s privacy.
Ensuring the flight was as close to directly above the pilot and operators take off / landing location (fig.4).
Ensuring the take-off / landing area would be an undisturbed area and easily controllable.
Only 60% of the total full battery’s charge is used, i.e, the craft is always flown home and landed with 40% remaining power.
Aircraft and RC batteries are constantly operator maintained and tested for efficiency.
No flight is carried out without live telemetry information to ensure battery voltage levels and GPS accuracy can be monitored throughout any flight.
RC is held by the pilot at all times, ready to provide immediate control to the craft.
Compass calibration performed before every flight, without fail.
Kit List
- DJI Phantom 2 running 3.02 firmware
- iOSD Mini (internal upgrade)
- Independently powered GPS tracker (internal upgrade)
- Video downlink TX for FPV
- Ground station monitor with built-in RX + aerials
- GoPro Hero 4 + ND Filter
- H3-3D Gimbal
Why use a Phantom 2?
Camera technology
In order to shoot sufficiently short intervals (I use 2s) you really need a GoPro. The new Phantom series‘ proprietary cameras currently only offer a maximum of 5 second intervals in timelapse mode. This is just too long to capture action of this nature. Using 2 second intervals means you get x1 second of realtime footage (at 30fps) for every minute you are in the air in a SPHF.
Reliability
Don’t get me wrong, the P2 was prone to issues when it launched, but as it matured I found it to be extremely reliable. I stuck to the 3.02 firmware and can honestly say it has had no issues after many flights over the last 12 months.
The other important thing to note is the 2 series is somewhat simpler than the more recent 3 series in that there is no additional complications like; a complimentary app, VPS, Lightbridge, etc. Again, don’t get me wrong, the Phantom 3 and the smart device apps are amazing and currently working very well (FW 1.3.20), but it does add another layer of complexity which can give rise to problems, coupled with the fact that firmware and app updates are far more frequent nowadays, meaning more user testing is required, more bugs, etc. To have a stable setup –which only requires a few tried and tested hardware upgrades, i.e, iOSD mini for telemetry, video downlink and a ground station for monitoring– is really what you want when doing this type of work.
Having said that, newer RPAS are getting more reliable, stable, with more endurance being squeezed out of larger batteries, which gives me hope that this technique can be pushed further using newer crafts. The ultimate setup would be something allowing DSLR quality images with more dynamic range, more stability, and more endurance.
But for now smaller systems can get the job done adequately as I have demonstrated in this project. If the Phantom 3 was capable of 2 second interval timelapse I would be very keen to test that out, as ultimately it has; a slightly longer endurance, more stable flight, additional GLONASS satellites for stability, and arguably a better camera which offers far more adjustable settings than a GoPro.
SUBSCRIBE FOR FRESH CONTENT
Follow me on social media for updates.
+1. good writeup and explanation.
(Petapixel sent me)
Love the thoughts on saftey but you are breaking the law. You canot fly over or near populated areas like you are, regardless of how you sell it, if the aircraft dies for whatever reason, if plummpted right down onto a live road, this is illegal. Your public posting of this WILL get you noticed by the CAA and they will investiagte. Flying over ANY road is not permissable in any case unless its been closed off for specfic filming.
Incorrect, I have a CAA exemption allowing to me fly in congested areas along with £5m public liability insurance. As I explain in my documentation, I am not flying ‘directly’ over uncontrollable things.
I notice you’d created a Disqus account just to throw scorn over this project on a couple of occasions, perhaps do your homework beforehand next time and reserve such comments for other publicly uploaded work that actually does contain illegal multirotor flying around the UK, there are plenty around.
Not sure he is breaking the law, and he seems to be very safety concious. These are single photos remember at 12MP so he can be a lot further away and zoom in, in post to get the same quality for an HD video. I am sure a lot of work went into this also in post stabilising each image with the one before. Nice job!
Nice job! I’m waiting on my gimbal for my 3dr Solo and you have given me some inspiration!